-
As-Rigid-As-Possible Solid Simulation with Oriented Particles
(Min Gyu Choi, Jehee Lee),
Computers and Graphics 2017 (Also presented in CAD/Graphics 2017, Best Paper Award).
 We propose a new as-rigid-as-possible approach to the real-time simulation of physics-based
deformable models for interactive applications such as computer games. The key observation is
that the efficacy of an embedded oriented particle representation and the stability of a
variational implicit formulation of the projective dynamics are complementary to each other.
We reformulate the variational implicit formulation to deal with an embedded graph of oriented
particles. Our new formulation is extremely stable, and our alternating local/global optimization
solver is both easy to implement and computationally efficient. Our method can deal with
one-dimensional (cable and rod), two-dimensional (shell), and three-dimensional (solid) models
in a uniform manner. Experimental results demonstrate that hundreds of deformable models with an
extremely large number of polygons can be simulated robustly in real time using thousands of
particles.
Supplementary video: YouTube (with Voice)
We propose a new as-rigid-as-possible approach to the real-time simulation of physics-based
deformable models for interactive applications such as computer games. The key observation is
that the efficacy of an embedded oriented particle representation and the stability of a
variational implicit formulation of the projective dynamics are complementary to each other.
We reformulate the variational implicit formulation to deal with an embedded graph of oriented
particles. Our new formulation is extremely stable, and our alternating local/global optimization
solver is both easy to implement and computationally efficient. Our method can deal with
one-dimensional (cable and rod), two-dimensional (shell), and three-dimensional (solid) models
in a uniform manner. Experimental results demonstrate that hundreds of deformable models with an
extremely large number of polygons can be simulated robustly in real time using thousands of
particles.
Supplementary video: YouTube (with Voice)
-
Clinical and Histopathological Features of Post Burn Pruritus
(In-Suk Kwak, Sook Young Park, Young Hee Choi, Soo Ick Cho, Yoon Seok Yang, Yong Se Cho, Min Gyu Choi, Cheong Hoon Seo, Chun Wook Park, Hyeon One Kim),
Journal of Burn Care and Research 2016.
The aim of the study was to evaluate the clinical and histopathological characteristics of patients
with post burn pruritus. The authors took skin samples from 62 burn patients with or without pruritus.
The measured skin condition includes thickness and paresthesia. Various clinical features were rated
on patient assessment scale (PSAS) and observer scar assessment scale. The samples were stained with
hematoxylin & eosin, Masson's trichrome, Verhoeff's elastic, and toluidine blue stain. The stained
samples were analyzed in terms of epidermal thickness, mononuclear cell infiltration, collagen bundles,
elastic fibers, and mast cell distribution. A total of 62 patients were divided into group A (43
patients with pruritus) and group B (19 patients without). The mean (SD) intensity of itch in group
A patients was 4.58 (3.24). Group A patients had thickened epidermises and higher scores on the PSAS
and observer scar assessment scale, especially on the PSAS score. Sensations, including stinging and
electric shock sensations, were more frequent in group A than in group B. Histological analysis
revealed that group A patients had thinner collagen bundles and more increased mast cell counts,
while others did not. Patients suffering from post burn pruritus had distinctive clinical and
histopathological features, such as prominent mast cell deposition and thin collagen bundles,
compared with group B patients. These results may help better understand post burn pruritus.
-
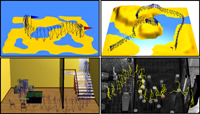
Real-Time Simulation of Ductile Fracture with Oriented Particles
(Min Gyu Choi),
Computer Animation and Virtual Worlds 2014 (Also presented in CASA 2014).
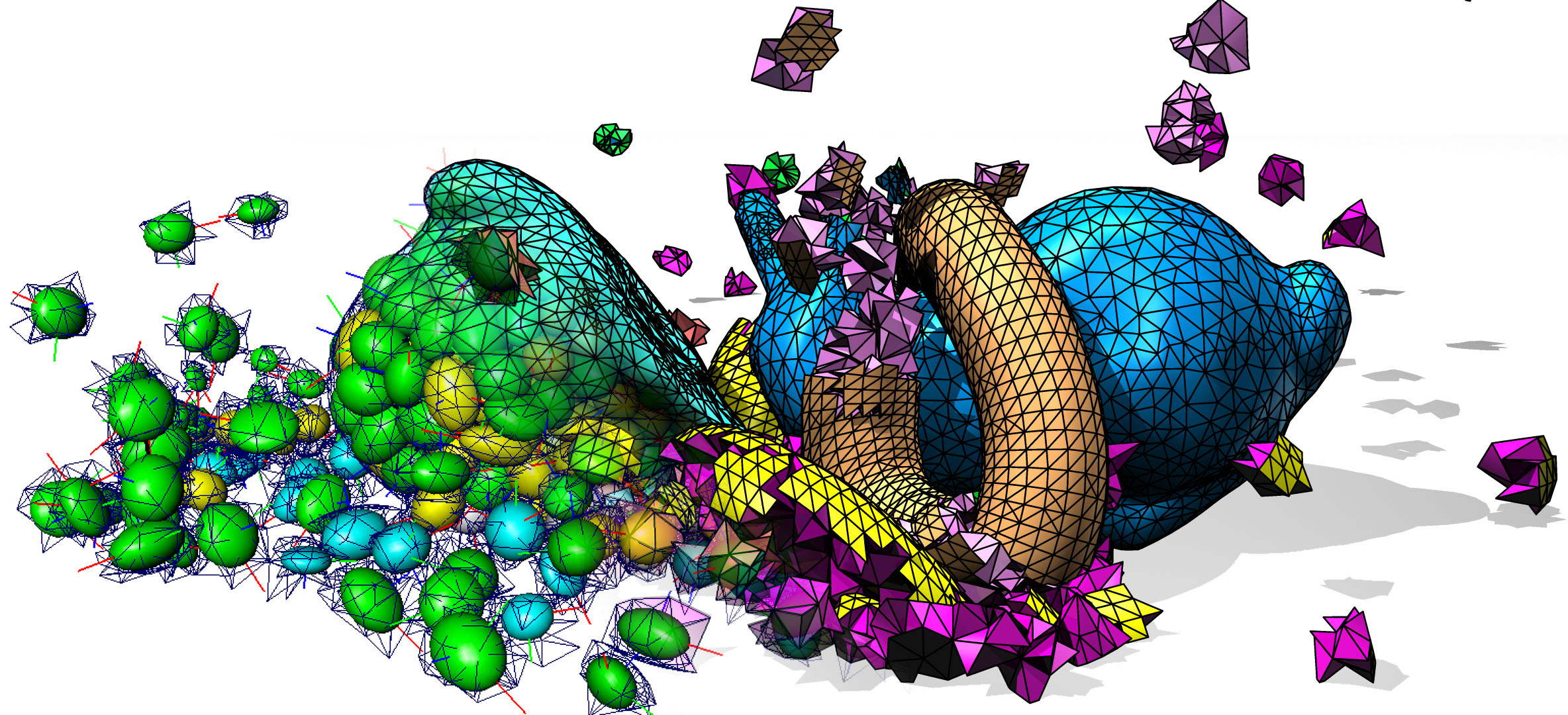 This paper proposes a practical approach for real-time simulation of large deformation and ductile
fracture. We adopt the oriented particles approach for robust and efficient simulation of large
deformation and develop a practical model for plastic flow and fracture. The proposed method finds
the optimal rotation and the optimal stretch in shape matching. The newly introduced optimal stretch
leads to a material strain that can be employed in the plastic flow and fracture criteria. We also
propose a GPU skinning method for real-time rendering of a deformed, fractured visual mesh.
Experimental results show that the proposed method can robustly simulate large, elastoplastic
deformation and ductile fracture of large visual meshes in real time.
Supplementary video: YouTube (with Voice)
This paper proposes a practical approach for real-time simulation of large deformation and ductile
fracture. We adopt the oriented particles approach for robust and efficient simulation of large
deformation and develop a practical model for plastic flow and fracture. The proposed method finds
the optimal rotation and the optimal stretch in shape matching. The newly introduced optimal stretch
leads to a material strain that can be employed in the plastic flow and fracture criteria. We also
propose a GPU skinning method for real-time rendering of a deformed, fractured visual mesh.
Experimental results show that the proposed method can robustly simulate large, elastoplastic
deformation and ductile fracture of large visual meshes in real time.
Supplementary video: YouTube (with Voice)
-
Increased expression of the aryl hydrocarbon receptor in patients with chronic inflammatory skin
diseases
(Hye One Kim, Jin Hye Kim, Bo Young Chung, Min Gyu Choi, Chun Wook Park),
Experimental Dermatology 2014.
Polychlorinated biphenyls (PCBs) and 2,3,7,8-tetrachlorodibenzo-p-dioxin (TCDD) are major
environmental pollutants, and their effects on the human body critically depend on the aryl
hydrocarbon receptor (AhR). The aim of this study was to evaluate the significance of the AhR
and its ligands in chronic inflammatory skin diseases such as atopic dermatitis (AD) and psoriasis.
Expression of AhR-related mRNA was increased in lesional skin from patients with AD and psoriasis
compared to those of normal skin from healthy controls. The AhR and aryl hydrocarbon receptor
nuclear translocator were colocalized in the nuclei of keratinocytes at the lower epidermis of
psoriatic lesions, which suggested activation of the AhR pathway. After treatment of normal human
epidermal keratinocytes with TCDD or PCBs, IL-6 and IL-8 production were increased. The results of
this study suggest that AhR is highly expressed in the acute lesional skin of patients with AD and
psoriasis, and the AhR pathway is activated especially in psoriasis.
-
Data-Driven Control of Flapping Flight
(Eunjung Ju, Jungdam Won, Jehee Lee, Byungkuk Choi, Junyong Noh, Min Gyu Choi),
ACM Transactions on Computer Graphics 2013.
 We present a physically based controller that simulates the flapping behavior of a bird in flight.
We recorded the motion of a dove using marker-based optical motion capture and high-speed video
cameras. The bird flight data thus acquired allow us to parameterize natural wingbeat cycles and
provide the simulated bird with reference trajectories to track in physics simulation.
Our controller simulates articulated rigid bodies of a bird's skeleton and deformable feathers
to reproduce the aerodynamics of bird flight. Motion capture from live birds is not as easy as
human motion capture because of the lack of coorperation from subjects. Therefore, the flight data
we could acquire were limited. We developed a new method to learn wingbeat controllers even from
sparse, biased observations of real bird flight. Our simulated bird imitates life-like flapping
of a flying bird while actively maintaining its balance. The bird flight is interactively
controllable and resilient to external disturbances.
Supplementary video:
Video (with Voice, MP4),
YouTube
We present a physically based controller that simulates the flapping behavior of a bird in flight.
We recorded the motion of a dove using marker-based optical motion capture and high-speed video
cameras. The bird flight data thus acquired allow us to parameterize natural wingbeat cycles and
provide the simulated bird with reference trajectories to track in physics simulation.
Our controller simulates articulated rigid bodies of a bird's skeleton and deformable feathers
to reproduce the aerodynamics of bird flight. Motion capture from live birds is not as easy as
human motion capture because of the lack of coorperation from subjects. Therefore, the flight data
we could acquire were limited. We developed a new method to learn wingbeat controllers even from
sparse, biased observations of real bird flight. Our simulated bird imitates life-like flapping
of a flying bird while actively maintaining its balance. The bird flight is interactively
controllable and resilient to external disturbances.
Supplementary video:
Video (with Voice, MP4),
YouTube
-
Real-Time Simulation of Thin Rods
(Min Gyu Choi, Oh-young Song),
KSII Transactions on Internet and Information Systems 2013.
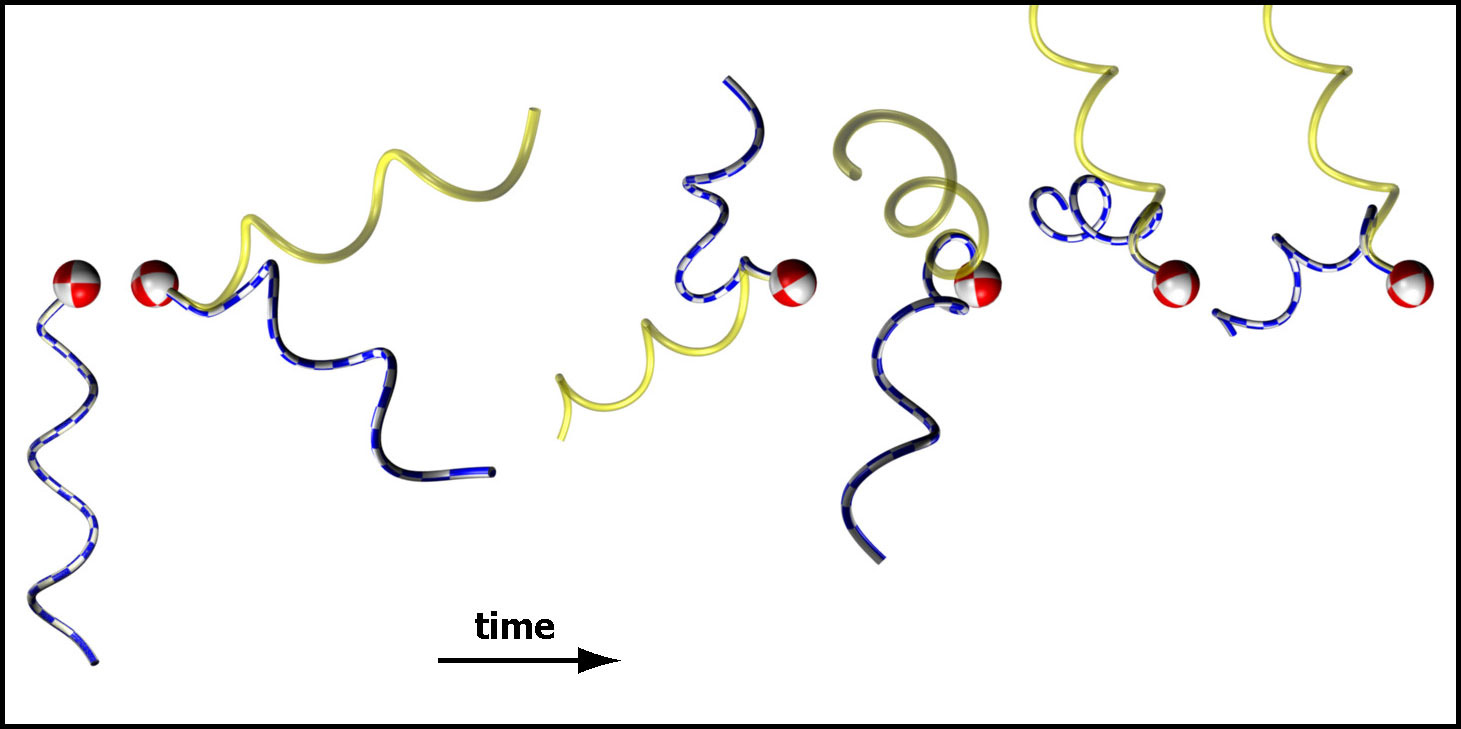 This paper proposes a real-time simulation technique for thin rods undergoing large rotational
deformation. Rods are thin objects such as ropes and hairs that can be abstracted as one-dimensional
structures. Development of a real-time physical model that can produce visually convincing animation
of thin rods has been a challenging problem in computer graphics. We adopt continuum mechanics to
formulate the governing equation, and develop a modal warping technique for rods to integrate the
governing equation in real-time; This is a novel extension of the previous modal warping techniques
developed for solids and shells. Experimental results show that the proposed method runs in real-time
even for large meshes and it can simulate large bending and/or twisting deformations.
Supplementary video: YouTube
This paper proposes a real-time simulation technique for thin rods undergoing large rotational
deformation. Rods are thin objects such as ropes and hairs that can be abstracted as one-dimensional
structures. Development of a real-time physical model that can produce visually convincing animation
of thin rods has been a challenging problem in computer graphics. We adopt continuum mechanics to
formulate the governing equation, and develop a modal warping technique for rods to integrate the
governing equation in real-time; This is a novel extension of the previous modal warping techniques
developed for solids and shells. Experimental results show that the proposed method runs in real-time
even for large meshes and it can simulate large bending and/or twisting deformations.
Supplementary video: YouTube
-
Evaluation of the Clinical Efficacy of Fractional Radiofrequency Microneedle Treatment
in Acne Scars and Large Facial Pores
(Soo Ick Cho, Bo Young Chung, Min Gyu Choi, Ji Hwoon Baek, Hee Jin Cho, Chun Wook Park,
Cheol Heon Lee, Hye One Kim),
Dermatologic Surgery 2012.
BACKGROUND: Fractional technology overcomes the problems of ablative lasers, such as inaccurate depth
control and damage to the epidermis. Minimally invasive fractional radiofrequency microneedle devices
allow for more-selective heating of the dermis.
OBJECTIVE: To evaluate the clinical efficacy of fractional radiofrequency microneedle (FRM) treatment
in acne scars and large facial pores.
MATERIALS AND METHODS: Thirty patients with acne scars and large facial pores were enrolled. Bipolar
radiofrequency energy was delivered to the skin through the electrodes of the FRM device. Skin lesions
were evaluated according to grade of acne scars, Investigator Global Assessment of large pores, skin
surface roughness, transepidermal water loss (TEWL), dermal density, microscopic and composite image,
sebum measurement, and questionnaires regarding patient satisfaction.
RESULTS: The grade of acne scars and Investigator Global Assessment of large pores improved in more
than 70% of all patients. Skin surface roughness, dermal density, and microscopic and composite images
also improved, whereas TEWL and sebum measurement did not change.
CONCLUSION: Clinical improvement from FRM treatment appeared to be related to dermal matrix
regeneration. FRM treatment may be effective in improving acne scars and facial pores.
-
Radiometric Resolution of Motion-Induced Synthetic Aperture Radiometer
(Hyuk Park, Adriano Camps, Min Gyu Choi, Yong-Hoon Kim),
IEEE GEOSCIENCE AND REMOTE SENSING LETTERS 2011.
The radiometric resolution of a motion-induced syn- thetic aperture radiometer (MISAR) is
analytically obtained from the standard deviation of a baseline response, an observation scenario,
and the imaging method of the MISAR. The intrinsic long integration time given by the whole dwell
time on moving platforms improves the radiometric resolution compared with the snapshot resolution
of other nominal synthetic aperture radiome- ters. In addition, it is illustrated that the MISAR
imaging holds the tradeoff relationship between the radiometric and spatial resolutions.
-
Real-Time Simulation of Thin Shells
(Min Gyu Choi, Seung Yong Woo, and Hyeong-Seok Ko),
Eurographics 2007.
 This paper proposes a real-time simulation technique for thin shells undergoing large deformation.
Shells are thin objects such as leaves and papers that can be abstracted as 2D structures.
Development of a satisfactory physical model that runs in real-time but produces visually
convincing animation of thin shells has been remaining a challenge in computer graphics.
Rather than resorting to shell theory which involves the most complex formulations in continuum
mechanics, we adopt the energy functions from the discrete shells proposed by
Grinspun et al. [GHDS03]. For real-time integration of the governing equation, we develop a modal
warping technique for shells. This new simulation framework results from making extensions
to the original modal warping technique [CK05] which was developed for the simulation of 3D solids.
We report experimental results, which show that the proposed method runs in real-time even for large
meshes, and that it can simulate large bending and/or twisting deformations with acceptable realism.
Supplementary video:
shells.mov (62MB, Quicktime),
YouTube
This paper proposes a real-time simulation technique for thin shells undergoing large deformation.
Shells are thin objects such as leaves and papers that can be abstracted as 2D structures.
Development of a satisfactory physical model that runs in real-time but produces visually
convincing animation of thin shells has been remaining a challenge in computer graphics.
Rather than resorting to shell theory which involves the most complex formulations in continuum
mechanics, we adopt the energy functions from the discrete shells proposed by
Grinspun et al. [GHDS03]. For real-time integration of the governing equation, we develop a modal
warping technique for shells. This new simulation framework results from making extensions
to the original modal warping technique [CK05] which was developed for the simulation of 3D solids.
We report experimental results, which show that the proposed method runs in real-time even for large
meshes, and that it can simulate large bending and/or twisting deformations with acceptable realism.
Supplementary video:
shells.mov (62MB, Quicktime),
YouTube
-
Image Dequantization: Restoration of Quantized Colors
(Tae-hoon Kim, Jongwoo Ahn, and Min Gyu Choi),
Eurographics 2007.
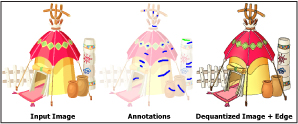 Color quantization replaces the color of each pixel with the closest representative
color, and thus it makes the resulting image partitioned into uniformly-colored regions.
As a consequence, continuous, detailed variations of color over the corresponding regions in the
original image are lost through color quantization. In this paper, we present a novel blind scheme
for restoring such variations from a color-quantized input image without a priori knowledge of the
quantization method. Our scheme identifies which pairs of uniformly-colored regions in the input
image should have continuous variations of color in the resulting image. Then, such regions are
seamlessly stitched through optimization while preserving the closest representative colors.
The user can optionally indicate which regions should be separated or stitched by scribbling
constraint brushes across the regions. We demonstrate the effectiveness of our approach through
diverse examples, such as photographs, cartoons, and artistic illustrations.
Supplementary material: supplement.pdf(4MB)
Color quantization replaces the color of each pixel with the closest representative
color, and thus it makes the resulting image partitioned into uniformly-colored regions.
As a consequence, continuous, detailed variations of color over the corresponding regions in the
original image are lost through color quantization. In this paper, we present a novel blind scheme
for restoring such variations from a color-quantized input image without a priori knowledge of the
quantization method. Our scheme identifies which pairs of uniformly-colored regions in the input
image should have continuous variations of color in the resulting image. Then, such regions are
seamlessly stitched through optimization while preserving the closest representative colors.
The user can optionally indicate which regions should be separated or stitched by scribbling
constraint brushes across the regions. We demonstrate the effectiveness of our approach through
diverse examples, such as photographs, cartoons, and artistic illustrations.
Supplementary material: supplement.pdf(4MB)
-
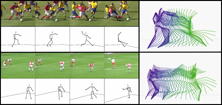
Video-Guided Motion Synthesis using Example Motions
(Min Je Park, Min Gyu Choi, Yoshihisa Shinagawa, and Sung Yong Shin),
ACM Transactions on Graphics 2006.
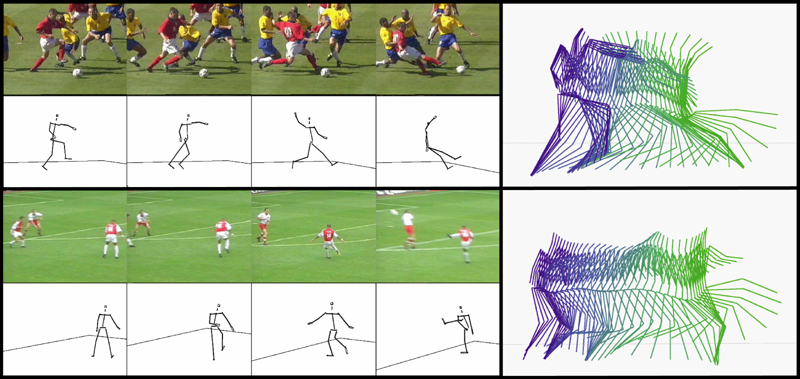
 Video taken from a single monocular camera is the most common means of recording human motion.
In this article, we present a practical, semiautomatic method for synthesizing a human motion
that is guided by such video. After preprocessing an input video, we select a precaptured motion
clip called a reference motion from a motion library. We then compute the sequence of body
configurations of a virtual character by deforming this motion, according to spacetime constraints
derived from a sequence of 2D features in the input video. Experimental results show that our
method can synthesize highly dynamic motions, such as kicking and header motions of soccer players.
We also showed the potential of our scheme as a new paradigm for motion capture, that is, capturing
motions from videos taken with a monocular camera, even outside a motion capture studio.
Supplementary video: synthesis.avi
(20MB, with voice, DivX)
Video taken from a single monocular camera is the most common means of recording human motion.
In this article, we present a practical, semiautomatic method for synthesizing a human motion
that is guided by such video. After preprocessing an input video, we select a precaptured motion
clip called a reference motion from a motion library. We then compute the sequence of body
configurations of a virtual character by deforming this motion, according to spacetime constraints
derived from a sequence of 2D features in the input video. Experimental results show that our
method can synthesize highly dynamic motions, such as kicking and header motions of soccer players.
We also showed the potential of our scheme as a new paradigm for motion capture, that is, capturing
motions from videos taken with a monocular camera, even outside a motion capture studio.
Supplementary video: synthesis.avi
(20MB, with voice, DivX)
-
Simulating Complex Hair with Robust Collision Handling
(Byoungwon Choe, Min Gyu Choi, and Hyeong-Seok Ko),
ACM SIGGRAPH/Eurographics Symposium on Computer Animation 2005.
 We present a new framework for simulating dynamic movements of complex hairstyles.
Assuming that hair consists of a number of wisps, we propose methods for simulating dynamic wisp
movements and handling wisp-body collisions and wisp-wisp interactions.
For simulation of wisps, we introduce a new hair dynamics model, a hybrid of the rigid multi-body
serial chain and mass-spring models, to formulate the simulation system using an implicit
integration method. Consequently, the simulator can impose collision/contact constraints
systematically, so that it can handle wisp-body collisions efficiently without the need for
backtracking or taking sub-timesteps. In addition, the simulator handles wisp-wisp collisions
based on the impulse while taking account of viscous damping and cohesive forces.
Experimental results show that the proposed technique can stably simulate hair with intricate
geometries while robustly handling wisp-body collisions and wisp-wisp interactions.
Supplementary video:
hair.mov (44MB, with voice, Quicktime),
YouTube
We present a new framework for simulating dynamic movements of complex hairstyles.
Assuming that hair consists of a number of wisps, we propose methods for simulating dynamic wisp
movements and handling wisp-body collisions and wisp-wisp interactions.
For simulation of wisps, we introduce a new hair dynamics model, a hybrid of the rigid multi-body
serial chain and mass-spring models, to formulate the simulation system using an implicit
integration method. Consequently, the simulator can impose collision/contact constraints
systematically, so that it can handle wisp-body collisions efficiently without the need for
backtracking or taking sub-timesteps. In addition, the simulator handles wisp-wisp collisions
based on the impulse while taking account of viscous damping and cohesive forces.
Experimental results show that the proposed technique can stably simulate hair with intricate
geometries while robustly handling wisp-body collisions and wisp-wisp interactions.
Supplementary video:
hair.mov (44MB, with voice, Quicktime),
YouTube
-
Modal Warping: Real-Time Simulation of Large Rotational Deformation and Manipulation
(Min Gyu Choi and Hyeong-Seok Ko),
IEEE Transactions on Visualization and Computer Graphics 2005.
 This paper proposes a real-time simulation technique for large deformations. Green's nonlinear
strain tensor accurately models large deformations; however, time stepping of the resulting
nonlinear system can be computationally expensive. Modal analysis based on a linear strain tensor
has been shown to be suitable for real-time simulation, but is accurate only for moderately
small deformations. In the present work, we identify the rotational component of an infinitesimal
deformation, and extend linear modal analysis to track that component. We then develop a procedure
to integrate the small rotations occurring at the nodal points. An interesting feature of our
formulation is that it can implement both position and orientation constraints in a straightforward
manner. These constraints can be used to interactively manipulate the shape of a deformable solid
by dragging/twisting a set of nodes. Experiments show that the proposed technique runs in real-time
even for a complex model, and that it can simulate large bending and/or twisting deformations with
acceptable realism.
Supplementary video:
warping.mov (48MB, with voice, Quicktime),
YouTube
This paper proposes a real-time simulation technique for large deformations. Green's nonlinear
strain tensor accurately models large deformations; however, time stepping of the resulting
nonlinear system can be computationally expensive. Modal analysis based on a linear strain tensor
has been shown to be suitable for real-time simulation, but is accurate only for moderately
small deformations. In the present work, we identify the rotational component of an infinitesimal
deformation, and extend linear modal analysis to track that component. We then develop a procedure
to integrate the small rotations occurring at the nodal points. An interesting feature of our
formulation is that it can implement both position and orientation constraints in a straightforward
manner. These constraints can be used to interactively manipulate the shape of a deformable solid
by dragging/twisting a set of nodes. Experiments show that the proposed technique runs in real-time
even for a complex model, and that it can simulate large bending and/or twisting deformations with
acceptable realism.
Supplementary video:
warping.mov (48MB, with voice, Quicktime),
YouTube
-
Planning Biped Locomotion using Motion Capture Data and Probabilistic Roadmaps
(Min Gyu Choi, Jehee Lee, and Sung Yong Shin),
ACM Transactions on Graphics 2003.
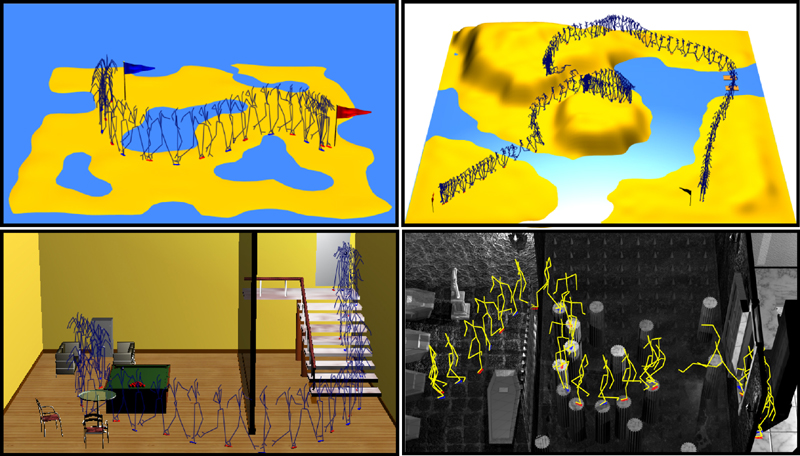
 Typical high-level directives for locomotion of human-like characters are useful for interactive
games and simulations as well as for off-line production animation. In this paper, we present
a new scheme for planning natural-looking locomotion of a biped figure to facilitate rapid motion
prototyping and task-level motion generation. Given start and goal positions in a virtual
environment, our scheme gives a sequence of motions to move from the start to the goal using
a set of live-captured motion clips. Based on a novel combination of probabilistic path
planning and hierarchical displacement mapping, our scheme consists of three parts: roadmap
construction, roadmap search, and motion generation. We randomly sample a set of valid footholds
of the biped figure from the environment to construct a directed graph, called a roadmap,
that guides the locomotion of the figure. Every edge of the roadmap is associated with a
live-captured motion clip. Augmenting the roadmap with a posture transition graph, we traverse it
to obtain the sequence of input motion clips and that of target footprints. We finally adapt
the motion sequence to the constraints specified by the footprint sequence to generate a desired
locomotion.
Supplementary video:
planning.avi (64.6MB, with voice, DivX5.02),
YouTube
Typical high-level directives for locomotion of human-like characters are useful for interactive
games and simulations as well as for off-line production animation. In this paper, we present
a new scheme for planning natural-looking locomotion of a biped figure to facilitate rapid motion
prototyping and task-level motion generation. Given start and goal positions in a virtual
environment, our scheme gives a sequence of motions to move from the start to the goal using
a set of live-captured motion clips. Based on a novel combination of probabilistic path
planning and hierarchical displacement mapping, our scheme consists of three parts: roadmap
construction, roadmap search, and motion generation. We randomly sample a set of valid footholds
of the biped figure from the environment to construct a directed graph, called a roadmap,
that guides the locomotion of the figure. Every edge of the roadmap is associated with a
live-captured motion clip. Augmenting the roadmap with a posture transition graph, we traverse it
to obtain the sequence of input motion clips and that of target footprints. We finally adapt
the motion sequence to the constraints specified by the footprint sequence to generate a desired
locomotion.
Supplementary video:
planning.avi (64.6MB, with voice, DivX5.02),
YouTube
-
Human Motion Reconstruction from Inter-frame Feature Correspondences of a Single Video
Stream using a Motion Library
(Min Je Park, Min Gyu Choi, and Sung Yong Shin),
ACM SIGGRAPH Symposium on Computer Animation 2002.
 Videos taken from a single camera are a most common source of human motions. In this paper,
we present a novel method to reconstruct the motion of a human-like figure from inter-frame
feature correspondences of a single video stream. We exploit a motion library to resolve the
depth ambiguity in recovering the 3D configurations from 2D features. Our reconstruction
method takes three major steps: timewarping to align the reference motion with that in the video,
reconstructing the joint orientations, and estimating the root trajectory. Experimental results
show that our approach can reconstruct highly dynamic motions such as shooting of soccer players,
which would be hard to do, otherwise.
Supplementary video: reconstruction.avi
(54.9MB, with voice, DivX5.02)
Videos taken from a single camera are a most common source of human motions. In this paper,
we present a novel method to reconstruct the motion of a human-like figure from inter-frame
feature correspondences of a single video stream. We exploit a motion library to resolve the
depth ambiguity in recovering the 3D configurations from 2D features. Our reconstruction
method takes three major steps: timewarping to align the reference motion with that in the video,
reconstructing the joint orientations, and estimating the root trajectory. Experimental results
show that our approach can reconstruct highly dynamic motions such as shooting of soccer players,
which would be hard to do, otherwise.
Supplementary video: reconstruction.avi
(54.9MB, with voice, DivX5.02)
-
Other Publications
|