ACM Transactions on Graphics
Planning Biped Locomotion using Motion Capture Data and Probabilistic Roadmaps
People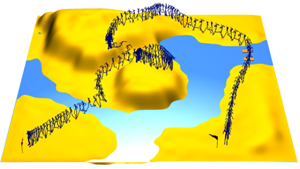
Min Gyu Choi
Jehee Lee
Sung Yong Shin
Typical high-level directives for locomotion of human-like characters are useful for interactive games and simulations as well as for off-line production animation. In this paper, we present a new scheme for planning natural-looking locomotion of a biped figure to facilitate rapid motion prototyping and task-level motion generation. Given start and goal positions in a virtual environment, our scheme gives a sequence of motions to move from the start to the goal using a set of live-captured motion clips. Based on a novel combination of probabilistic path planning and hierarchical displacement mapping, our scheme consists of three parts: roadmap construction, roadmap search, and motion generation. We randomly sample a set of valid footholds of the biped figure from the environment to construct a directed graph, called a roadmap, that guides the locomotion of the figure. Every edge of the roadmap is associated with a live-captured motion clip. Augmenting the roadmap with a posture transition graph, we traverse it to obtain the sequence of input motion clips and that of target footprints. We finally adapt the motion sequence to the constraints specified by the footprint sequence to generate a desired locomotion.
Citation
Min Gyu Choi, Jehee Lee and Sung Yong Shin. Planning Biped Locomotion
using Motion Capture Data and Probabilistic Roadmaps. ACM
Transactions on Graphics, 22(2):182-203, 2003.